Yunho (Ricky) Kim
|
I am a roboticist at Neuromeka AI team and am currently completing South Korea's mandatory military service (~2027.03). Currently, I am undertaking research on bi-manual manipulation and high-level motion planning, mentored by Joonho Lee. Before joining Neuromeka, I received my MS at KAIST (Korea Advanced Institute of Science and Technology) and BS at Seoul National University, both majoring in mechanical engineering. During my study at KAIST, I was fortunate to be advised by Prof. Jemin Hwangbo and conducted research on legged robot locomotion and navigation. |
Publications
 |
Learning-augmented robotic automation for real-world manufacturing Yunho Kim, Quan Nguyen, Taewhan Kim, Youngjin Heo, Joonho Lee Under Review [Project page] |
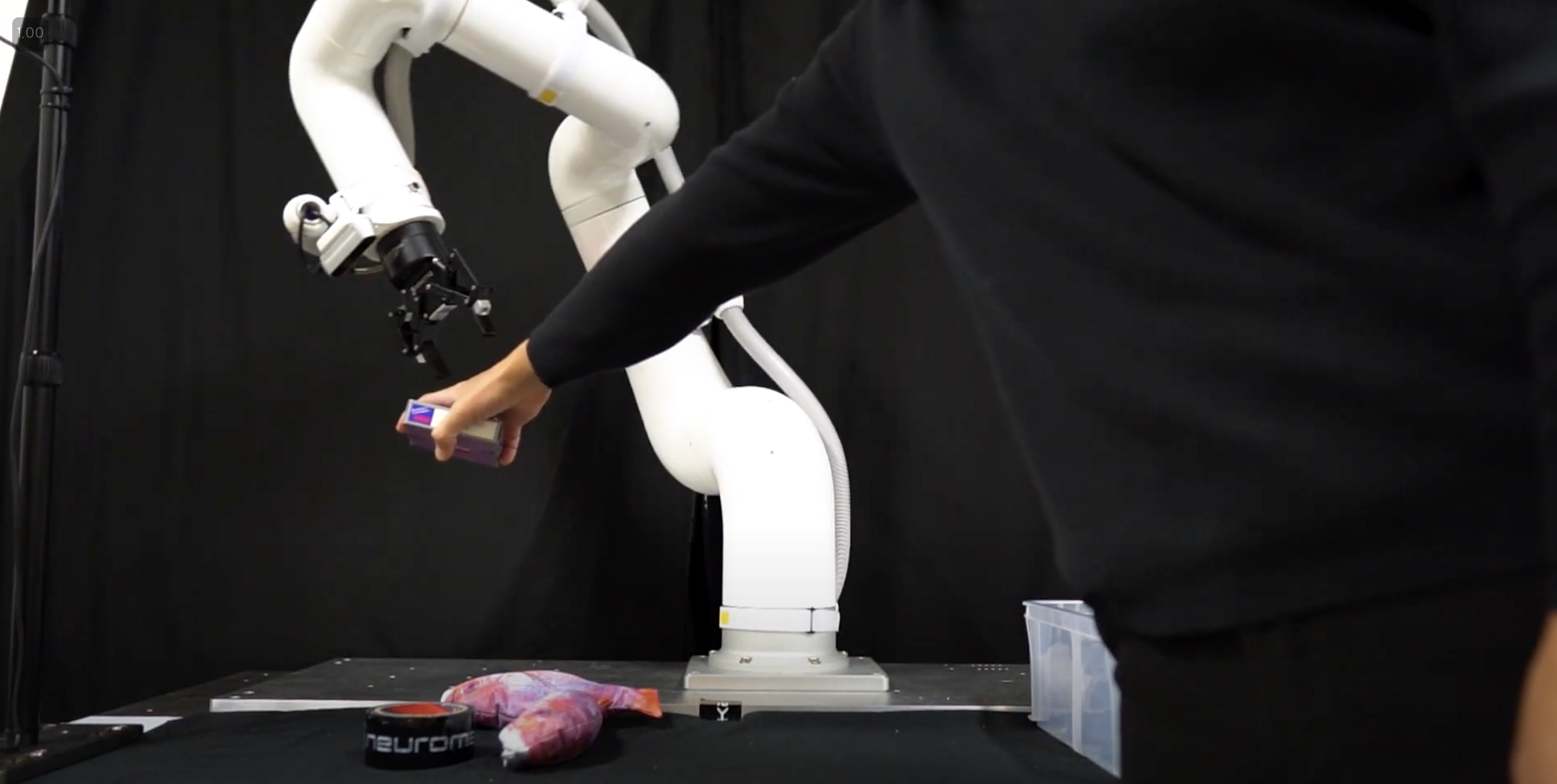 |
Learning Fast, Tool-aware Collision Avoidance for Collaborative Robots Joonho Lee, Yunho Kim, Seokjoon Kim, Quan Nguyen, Youngjin Heo IEEE Robotics and Automation Letters (RA-L) 2025 [Project page] |
 |
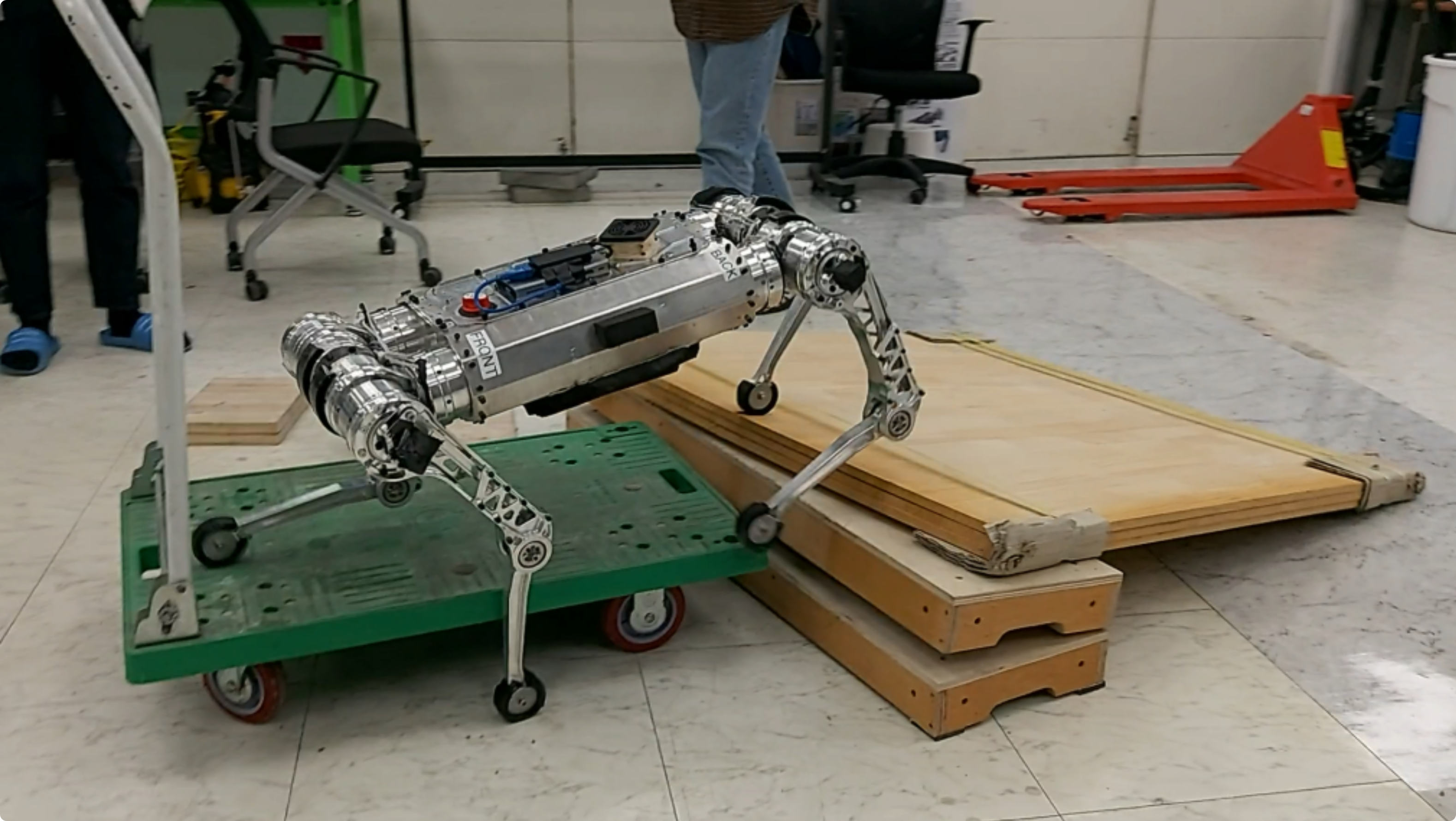
High-speed Control and Navigation for Quadrupedal Robots on Complex and Discrete Terrain Hyeongjun Kim, Hyunsik Oh, Jeongsoo Park, Yunho Kim, Donghoon Youm, Moonkyu Jung, Minho Lee, Jemin Hwangbo Science Robotics 2025 [Project page] [Summary video] |
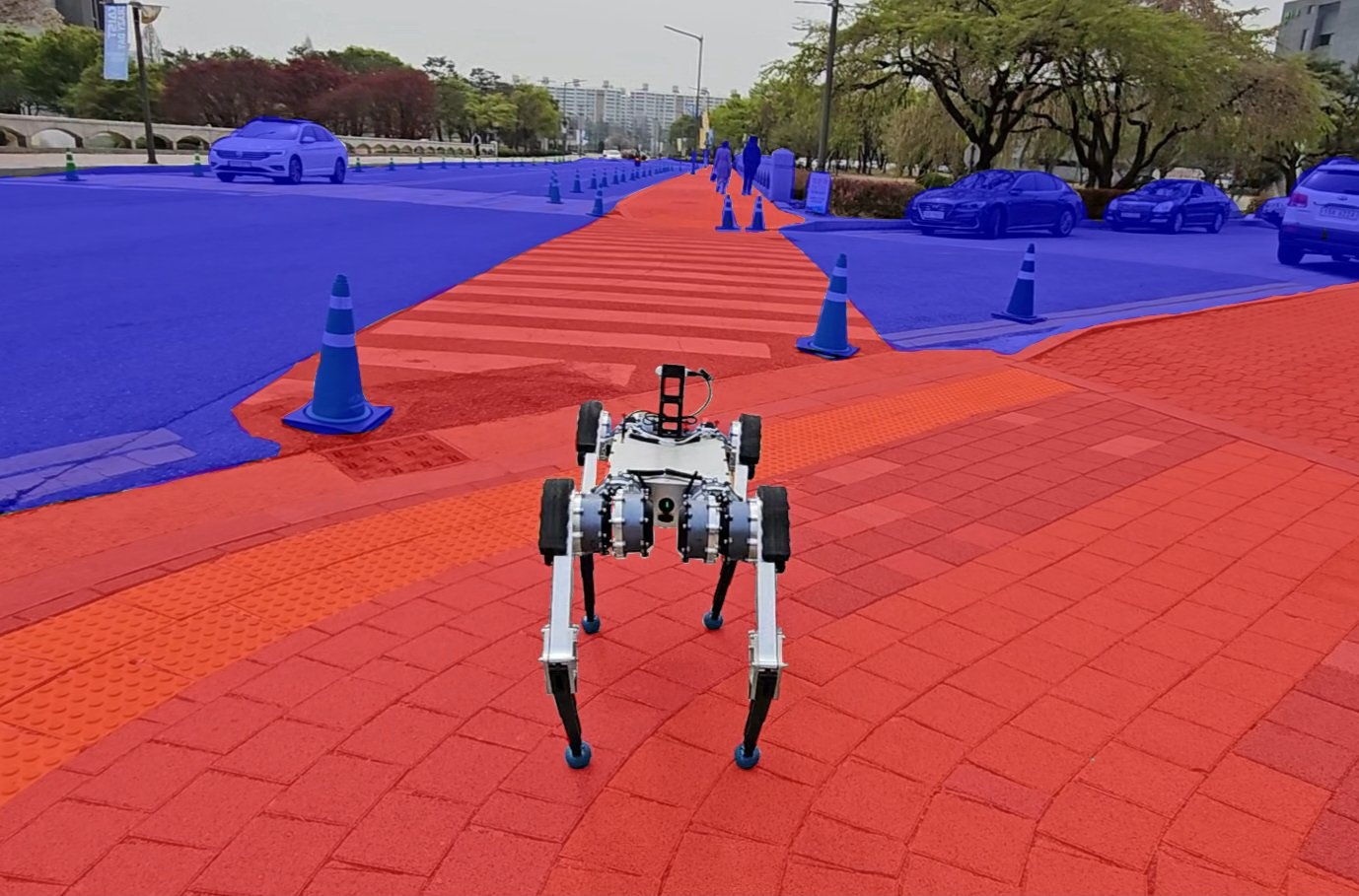 |
Learning Semantic Traversability with Egocentric Video and Automated Annotation Strategy Yunho Kim*, Jeong Hyun Lee*, Choongin Lee, Juhyeok Mun, Donghoon Youm, Jeongsoo Park, Jemin Hwangbo IEEE Robotics and Automation Letters (RA-L) 2024 [Project page] [Summary video] |
 |
Not Only Rewards But Also Constraints: Applications on Legged Robot Locomotion Yunho Kim, Hyunsik Oh, Jeonghyun Lee, Jinhyeok Choi, Gwanghyeon Ji, Moonkyu Jung, Donghoon Youm, Jemin Hwangbo IEEE Transactions on Robotics (T-RO) 2024 [Project page] [Summary video] |
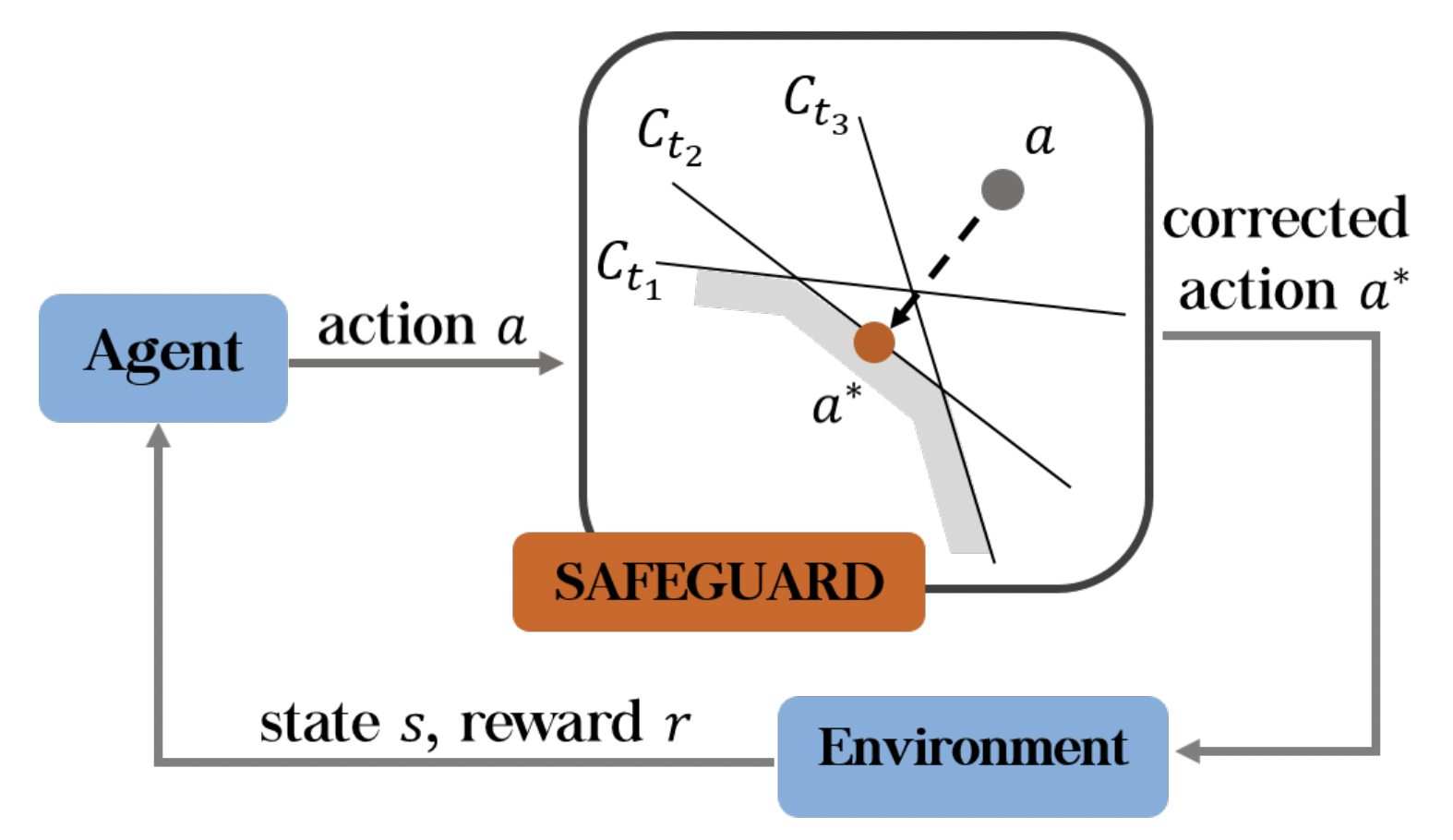 |
Safety Guided Policy Optimization Dohyeong Kim, Yunho Kim, Kyungjae Lee, Songhwai Oh International Conference on Intelligent Robots and Systems (IROS) 2022 [Paper] [Summary video] |
 |
Learning Forward Dynamics Model and Informed Trajectory Sampler for Safe Quadruped Navigation Yunho Kim, Chanyoung Kim, Jemin Hwangbo Robotics: Science and Systems (RSS) 2022 [Project page] [Summary video] |
Personal Projects
 |
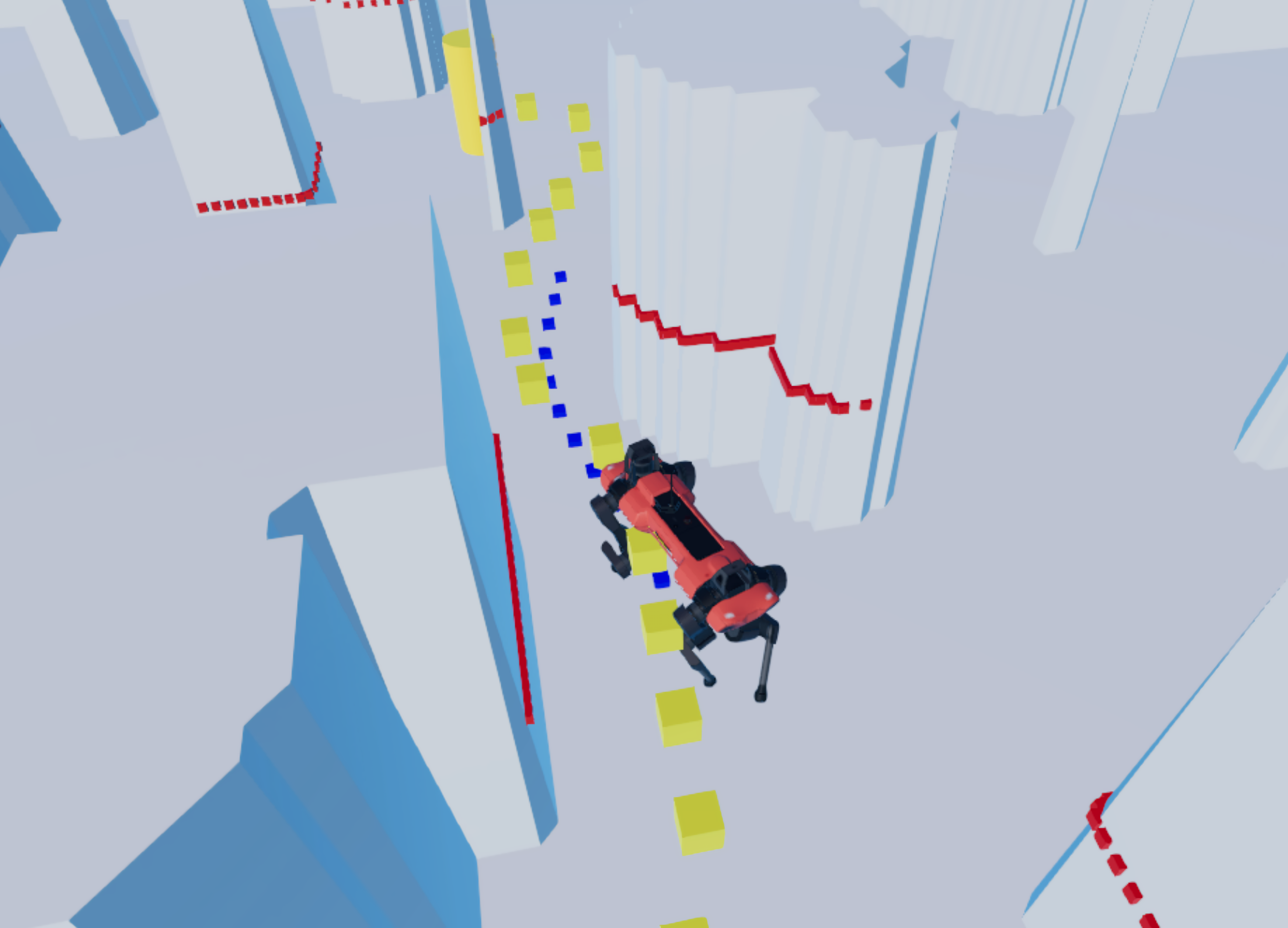
Perceptive locomotion [Point-goal command video] [Velocity command video] Design perceptive locomotion controllers for quadruped robots using deep reinforcement learning. |
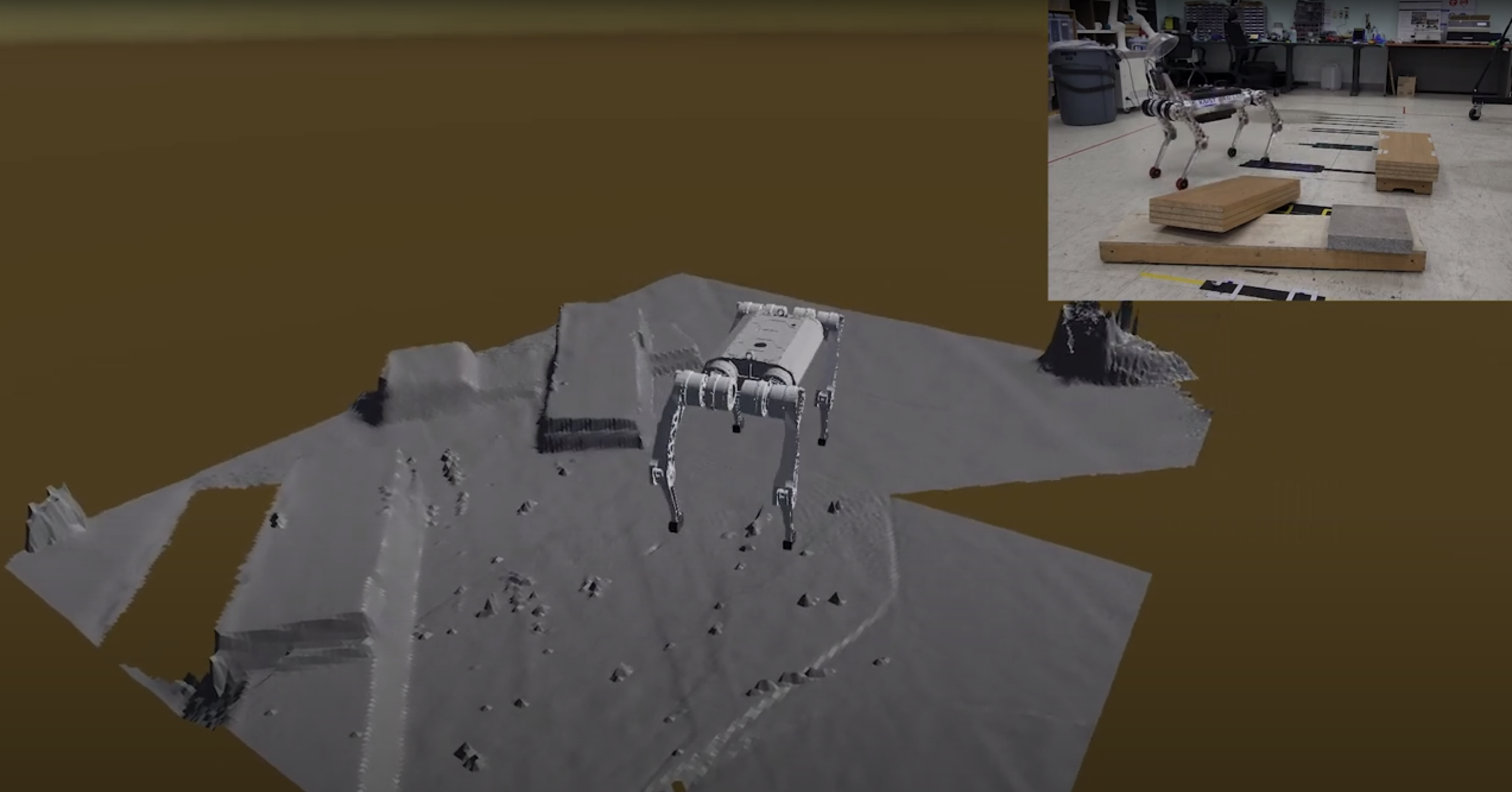 |
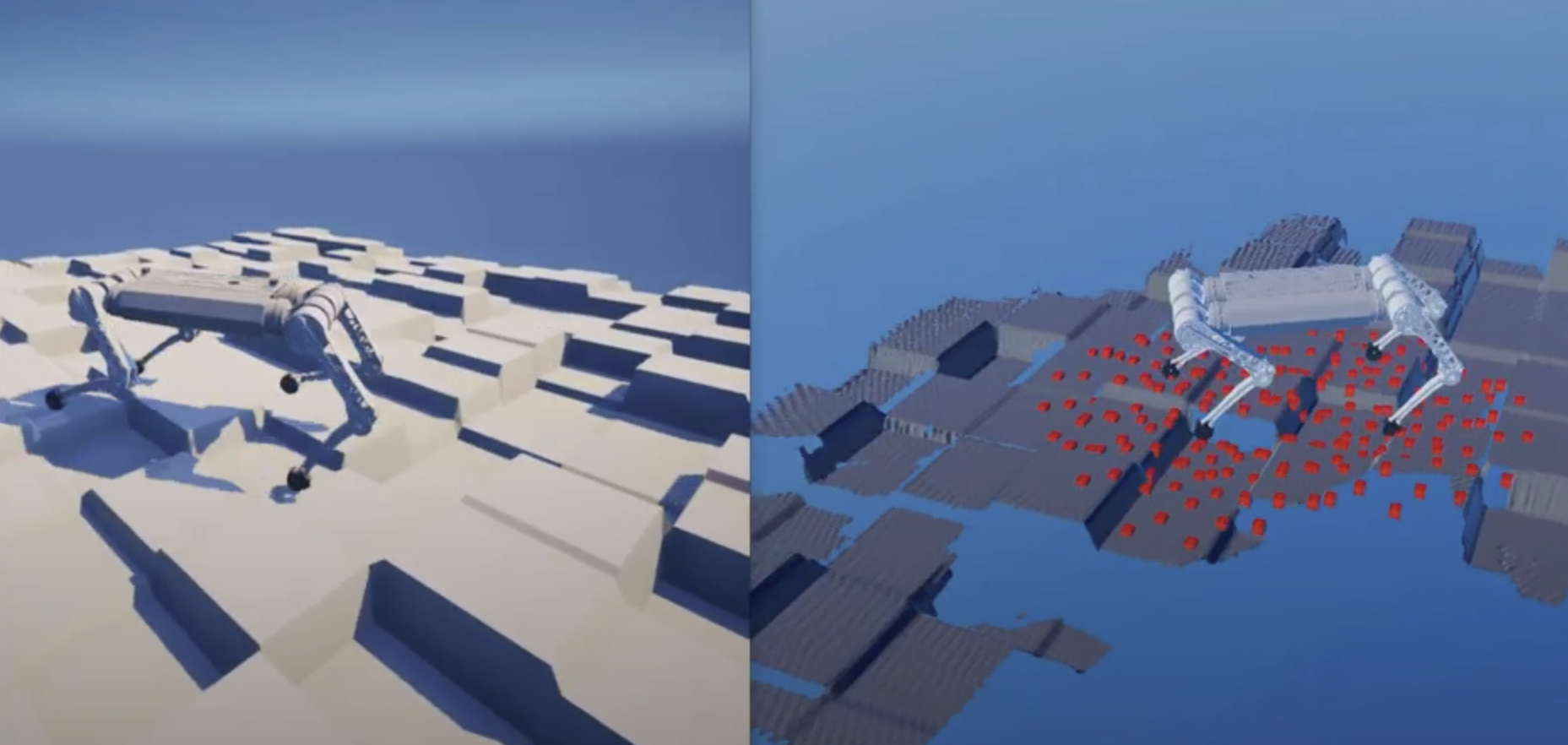
Terrain mapping [Simulation video] [Real-world video] Implement 2.5D terrain mapping pipeline in both the simulation and the real world. |
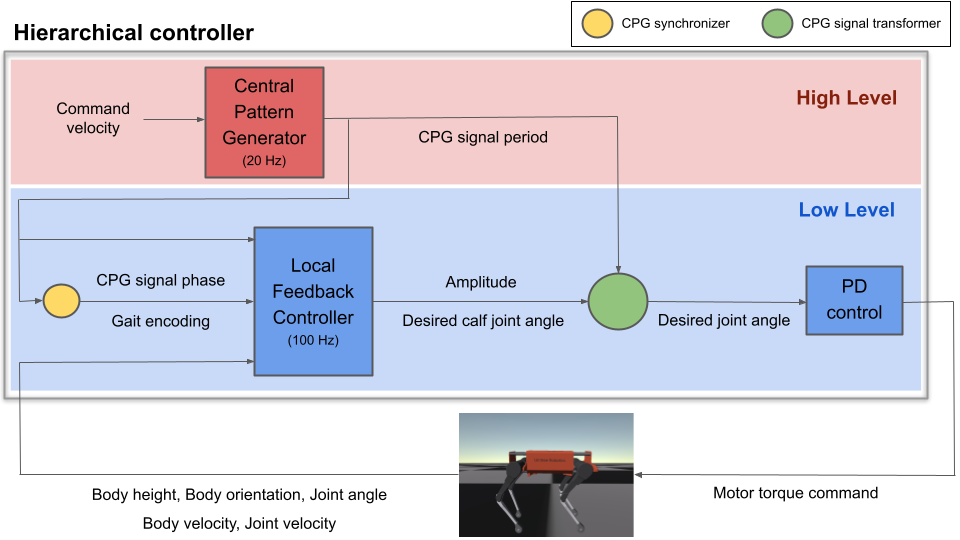 |
Learning Multiple Gaits of Quadruped Robot Using Hierarchical Reinforcement Learning [Project page] Propose a multiple-gait learning framework inspired by central pattern generators. |
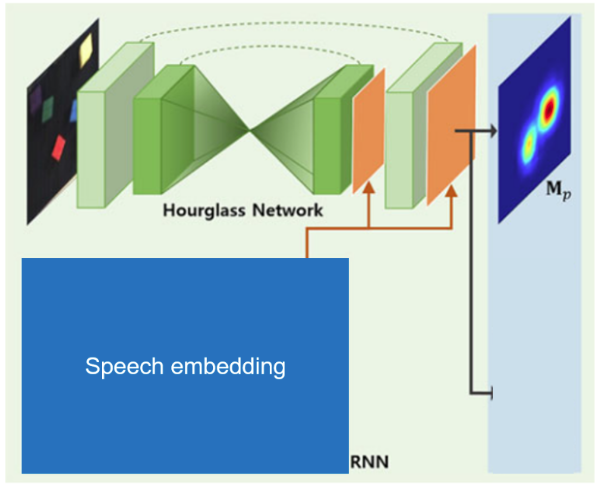 |
Speech2Pickup: Speech Embedding Based Human-Robot Collaboration Model for Multi Object Robot Grasping Task [Code] Process data and train a deep neural network to detect objects given speech commands. |
 |
Autonomous RC Car [Code] Implement path tracking and planning algorithms for autonomous RC cars. |